Wizja, Technologia i Plan na 2026
Witajcie w pierwszym oficjalnym wpisie z serii DevLog projektu FlyArt.
Zanim zanurzymy się w głębiny kalibracji siły nośnej i optymalizacji siatek, musimy zrobić krok wstecz. Ten wpis poświęcony jest fundamentom – temu, co budujemy, dlaczego wybraliśmy te konkretne narzędzia i jak zamierzamy doprowadzić projekt do Vertical Slice w nadchodzących miesiącach.
FlyArt to projekt powstający z pasji do lotu oraz zamiłowania do inżynierskiego podejścia. To pierwszy z serii wpisów, w których będziemy odkrywać karty produkcji – od czystej matematyki po finalne wrażenia z lotu.
Wizja: Autentyczność, która wciąga
Chcemy oddać to, co w lotach wingsuit najpiękniejsze: poczucie pędu, współpracę z oporem powietrza i precyzję planowania linii lotu. Budujemy zaawansowany model fizyczny po to, by każde "muśnięcie skał" i każdy wiraż dawały realną satysfakcję. FlyArt ma być intuicyjny dla gracza casualowego, a jednocześnie oferować głębię, której szukają weterani symulacji.
Oto główne filary projektu:
- Matematyka zamiast skryptów: Fizyka oparta na rzeczywistych danych aerodynamicznych, gdzie każdy ruch ciała i zmiana kąta natarcia mają realny wpływ na lot.
- Fotorealizm 1:1: Wykorzystanie danych LiDAR do wiernego odwzorowania legendarnych lokacji BASE-jumpingowych.
- Spójność multiplatformowa: Ten sam silnik fizyczny na PC (z pełnym VR FPP) oraz na urządzeniach mobilnych (TPP).
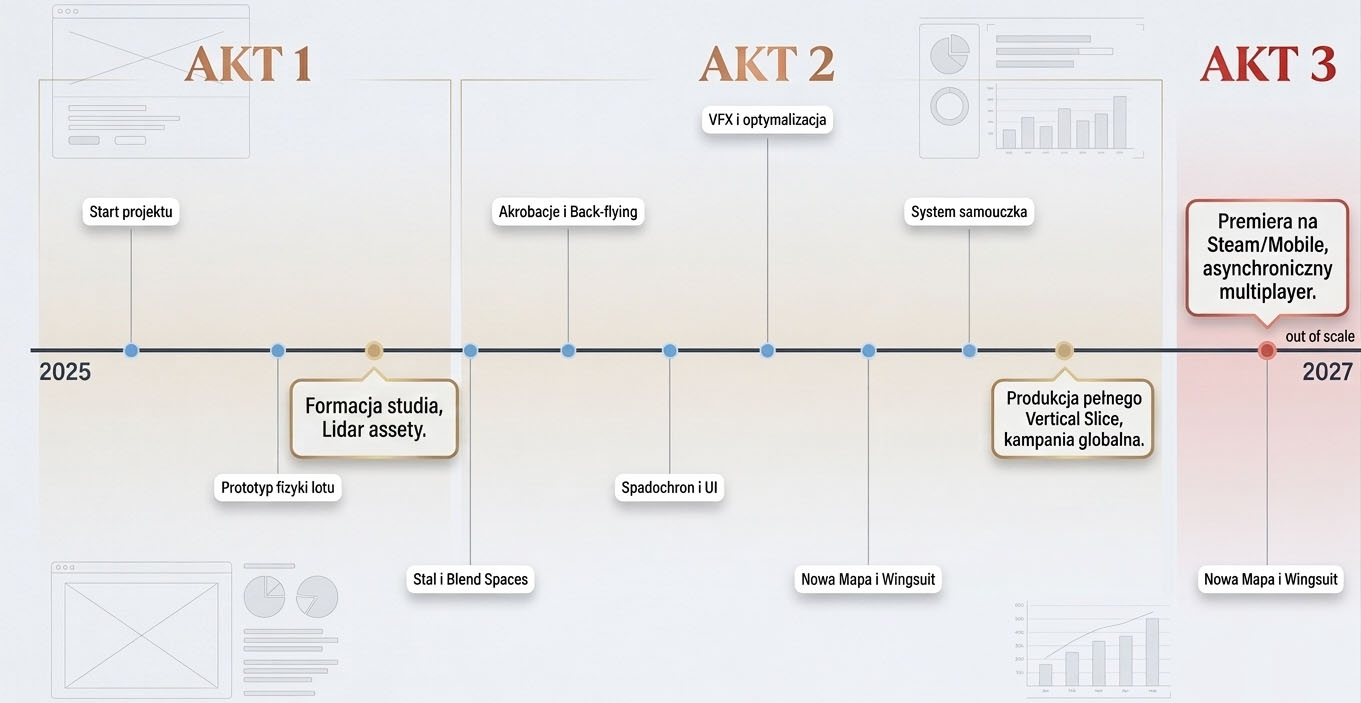
Roadmapa: Trzy Akty Rozwoju
Nasz plan jest precyzyjny i podzielony na fazy, które pozwolą nam na systematyczną walidację technologii.